NRI-INT-COLLAB
Collaborative Task Planning and Learning through Language Communication in a Human-Robot Team
Collaborator: Interactive Robotics Group @ Massachusetts Institute of Technology
Motivations and Objectives
Challenges
Most robotic planning systems operate based on a closed set of representations. However, in reality, robots are not likely to have a complete set of domain models and will often encounter new situations or new tasks they don’t have any knowledge or experience about.
Even given sufficient state and action representations, automated planning is still computationally challenging. Designing planners that can generate high-quality plans and perform efficiently across various domains remains an open problem.
Objective
The overall goal of this project is to eevelop a novel framework that tightly links language and dialogue processing with the robot’s underlying planning system to support collaborative task planning and learning in a human-robot team.
Descriptions
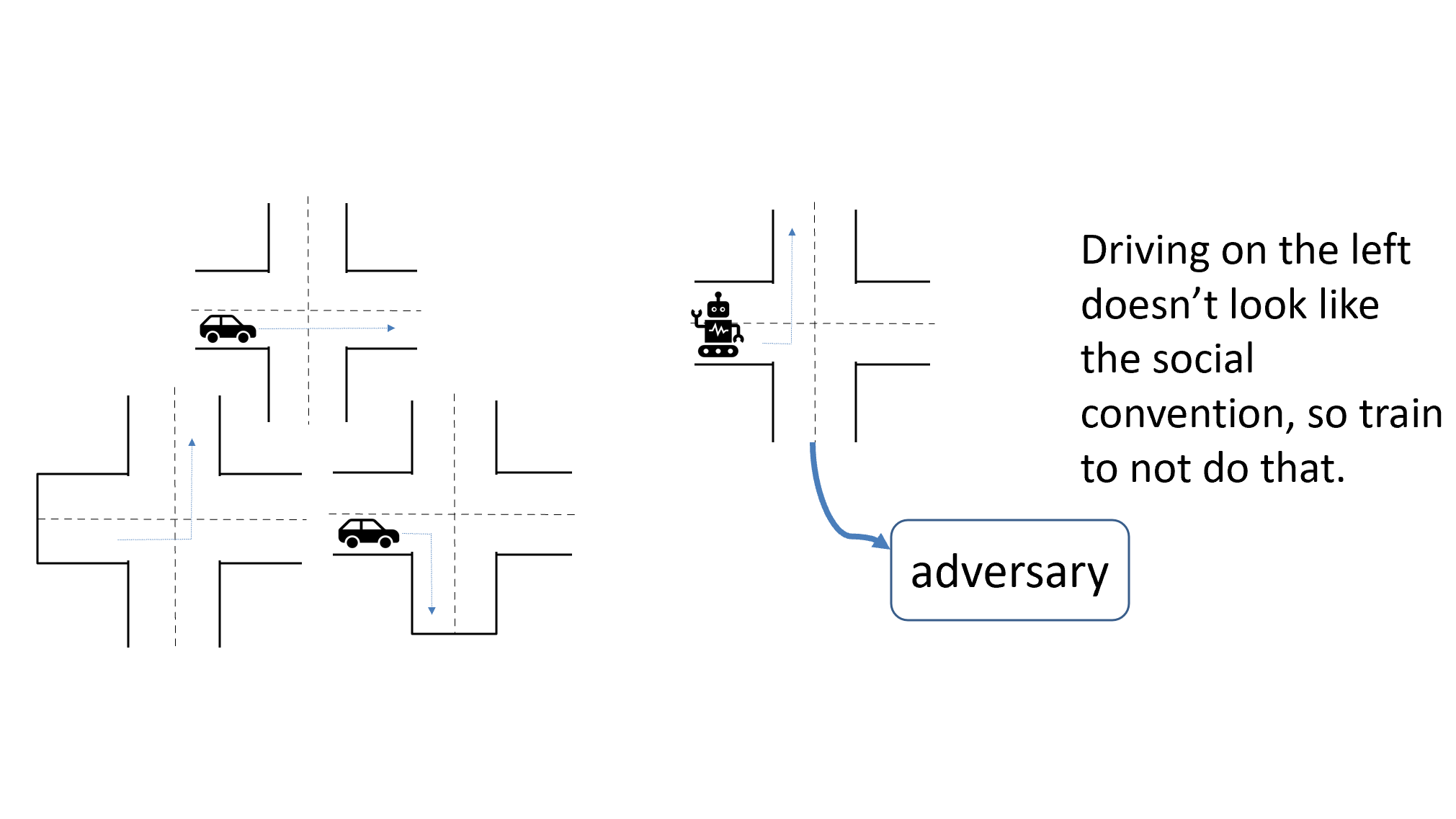
Style Learning
Help agents learn to behave according to others’ social conventions, enabling efficient teamwork.
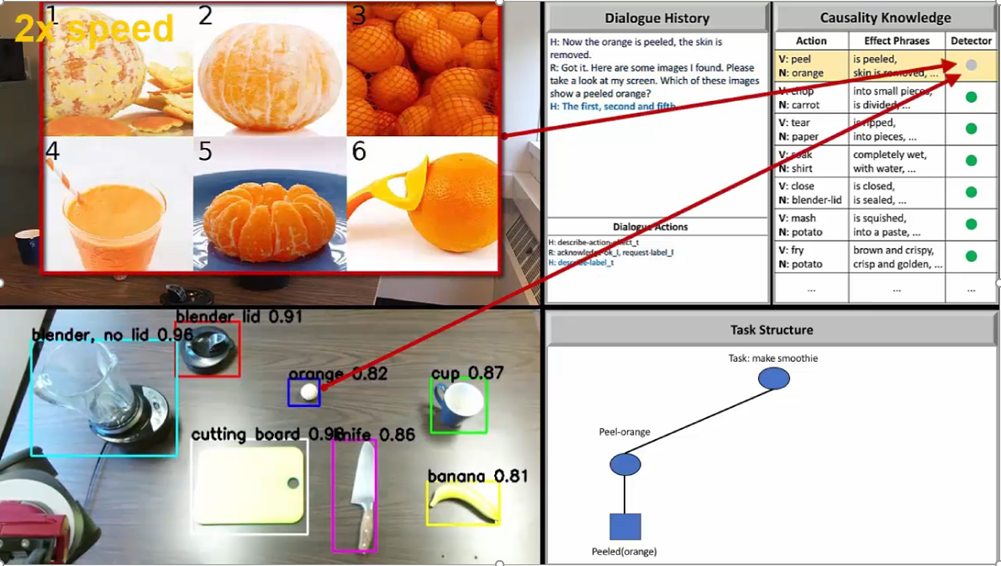
Action-Effect Learning
Incorporating action effect learning in teaching robots new tasks through language communication.
Related Papers
- M. Tucker, Y. Zhou, and J. Shah, J. Adversarially Guided Self-Play for Adopting Social Conventions. arXiv preprint, 2020.
- Q. Gao, S. Yang, J. Y. Chai, and L. Vanderwende. What Action Causes This? Towards Naive Physical Action-Effect Prediction. Proceedings of the 56th Annual Meeting of the Association for Computational Linguistics (ACL), 2018. [Data]